╣®æ¬(y©®ng)ūįäė(d©░ng)ķTų„┐žŲ„...
|
| ╣®æ¬(y©®ng)ūįäė(d©░ng)ķTų„┐žŲ„ |
|
| «a(ch©Żn)ŲĘ├¹ĘQŻ║╣®æ¬(y©®ng)ūįäė(d©░ng)ķTų„┐žŲ„ |
| «ö(d©Īng) Ū░ ār(ji©ż)Ż║
├µūh |
░l(f©Ī)▓╝╚šŲ┌Ż║2009/2/20 |
| ą┼ŽóŅÉą═Ż║╣®æ¬(y©®ng) |
ėąą¦Ģr(sh©¬)ķgŻ║90 |
| «a(ch©Żn)ŲĘöĄ(sh©┤)┴┐Ż║ |
╦∙ į┌ ĄžŻ║
ÅV¢|ųą╔Į
|
 |
|
|
|
|
|
|
ūįäė(d©░ng)ķTų„┐žŲ„
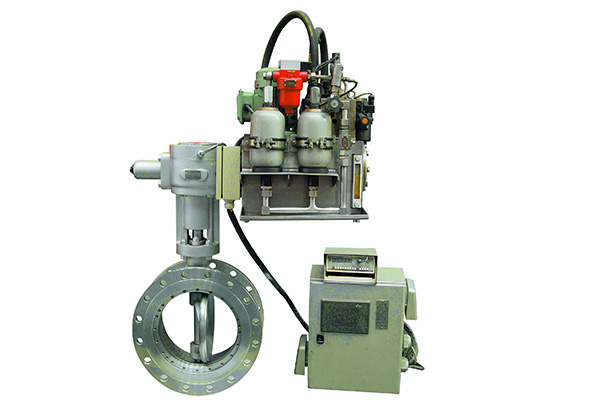
ūįäė(d©░ng)ķT▓╔ė├├└ć°(gu©«)╬óąŠ╣½╦Š16╬╗å╬Ų¼ÖC(j©®)dsPIC30F3010ū÷ų„┐žąŠŲ¼.ęį╝░PWM├}īÆš{(di©żo)ųŲĪóPIDūįäė(d©░ng)Ę┤üš{(di©żo)╣Ø(ji©”)Ą╚ČÓĘN¼F(xi©żn)┤·Ė▀ą┬╝╝ąg(sh©┤),“ī(q©▒)äė(d©░ng)¤o(w©▓)╦óļŖÖC(j©®)═Žäė(d©░ng)ūįäė(d©░ng)ķT▀\(y©┤n)ąąĪŻŠ▀ėąūįūR(sh©¬)äeĪóūį╗ųÅ═(f©┤)Īóūį▒Żūo(h©┤)Ą╚ČÓĒŚ(xi©żng)ųŪ─▄╗»╣”─▄ĪŻ
1 ūįäė(d©░ng)ķT┐žųŲŲ„╣żū„įŁ└Ē
ĪĪĪĪūįäė(d©░ng)ķTĄ─╣żū„įŁ└Ē×ķķT░Õė╔ų¦╝▄ų¦ō╬į┌ī¦(d©Żo)▄ē╔ŽŻ¼ī¦(d©Żo)▄ē▀BĮėĄĮ“ī(q©▒)äė(d©░ng)čbų├Ż¼“ī(q©▒)äė(d©░ng)čbų├═©▀^ī¦(d©Żo)▄ēĦäė(d©░ng)ķT░Õ╗¼äė(d©░ng)ĪŻ├┐éĆ(g©©)ķTČ╝ėąµiķ]ÖC(j©®)śŗ(g©░u)Ż¼į┌ķTĻP(gu©Īn)ķ]ĄĮ╬╗Ģr(sh©¬)Ż¼µiķ]ÖC(j©®)śŗ(g©░u)īŹ(sh©¬)¼F(xi©żn)ÖC(j©®)ąĄµiķ]ĪŻ▄ćķTŠ▀ėą┴Ń╦┘▒Żūo(h©┤)║═░▓╚½▀BµiļŖ┬ĘŻ¼ķ_ĻP(gu©Īn)ķTėął¾(b©żo)Š»čbų├ĪŻļŖäė(d©░ng)ķTĄ─“ī(q©▒)äė(d©░ng)čbų├╩Ūę╗ĮMļŖÖC(j©®)ĮM╝■Ż¼├┐╣Ø(ji©”)▄ćėąę╗éĆ(g©©)ų„┐žųŲŲ„üĒ┐žųŲ▒Š╣Ø(ji©”)▄ćĄ─▄ćķTĪŻų„┐žųŲŲ„╩Ūūįäė(d©░ng)ķTĄ─ųĖō]ųąą─Ż¼═©▀^ā╚(n©©i)▓┐ųĖ┴Ņ│╠ą“Ż¼░l(f©Ī)│÷ŽÓæ¬(y©®ng)ųĖ┴ŅŻ¼ųĖō]ļŖÖC(j©®)╗“ļŖµiŅÉŽĄĮy(t©»ng)╣żū„Ż╗═¼Ģr(sh©¬)╚╦éāę▓┐╔═©▀^ų„┐žŲ„š{(di©żo)╣Ø(ji©”)ķT╔╚ķ_åó╦┘Č╚Īóķ_åóĘ∙Č╚Ą╚ģóöĄ(sh©┤)Ż«═Ō▓┐ą┼╠¢(h©żo)ė╔Ėąæ¬(y©®ng)╠Į£y(c©©)Ų„═Ļ│╔Ż¼«ö(d©Īng)ėąęŲäė(d©░ng)Ą─╬’¾w▀M(j©¼n)╚ļ╦¹Ą─╣żū„ĘČć·Ģr(sh©¬)Ż¼╦¹Š═Įoų„┐žųŲŲ„ę╗éĆ(g©©)├}ø_ą┼╠¢(h©żo)Ż╗ļŖÖC(j©®)╠ß╣®ķ_ķT┼cĻP(gu©Īn)ķTĄ─ų„äė(d©░ng)┴”Ż¼╣żśI(y©©)ūįäė(d©░ng)ķTķT╔╚╝ė╦┘┼c£p╦┘▀\(y©┤n)ąąĪŻūįäė(d©░ng)ķTķT╔╚═Ļ│╔ę╗┤╬ķ_ķT┼cĻP(gu©Īn)ķTŻ¼Ųõ╣żū„┴„│╠╚ńŽ┬Ż║Ėąæ¬(y©®ng)╠Į£y(c©©)Ų„īó╠Į£y(c©©)ą┼╠¢(h©żo)é„ų┴ų„┐žŲ„Ż¼ų„┐žŲ„┼ąöÓ║¾┐žųŲļŖÖC(j©®)▀\(y©┤n)ąąŻ¼═¼Ģr(sh©¬)▒O(ji©Īn)┐žļŖÖC(j©®)▐D(zhu©Żn)öĄ(sh©┤)╝░ļŖ┴„Ż¼ęį▒Ń┐žųŲļŖÖC(j©®)į┌ę╗Č©Ģr(sh©¬)║“╝ė┴”║═▀M(j©¼n)╚ļ┬²ąą▀\(y©┤n)ąą╝░Ę┤▐D(zhu©Żn)ĪŻļŖÖC(j©®)Ą├ĄĮę╗Č©▀\(y©┤n)ąąļŖ┴„║¾ū÷š²Ž“▀\(y©┤n)ąąŻ¼īóäė(d©░ng)┴”Įø(j©®ng)é„äė(d©░ng)ÖC(j©®)śŗ(g©░u)╩╣ūįäė(d©░ng)ķT╔╚ķ_åóŻ╗ūįäė(d©░ng)╔ņ┐sķT╔╚ķ_åó║¾ė╔┐žųŲŲ„ū„│÷┼ąöÓŻ¼┐žųŲ±R▀_(d©ó)ū„Ę┤Ž“▀\(y©┤n)äė(d©░ng)Ż¼ĻP(gu©Īn)ķ]ūįäė(d©░ng)ķT╔╚ĪŻ
ĪĪĪĪ2 ┐žųŲŽĄĮy(t©»ng)Ą─ų„┐žŲ„╝░ł╠(zh©¬)ąąŲ„
ĪĪĪĪ┴”Ųš╠®ūįäė(d©░ng)ķT£y(c©©)┐žŽĄĮy(t©»ng)Ą─ų„┐žųŲŲ„▓╔ė├├└ć°(gu©«)╬óąŠ╣½╦Š16╬╗å╬Ų¼ÖC(j©®)dsPIC30F3010ū÷ų„┐žąŠŲ¼.ęį╝░PWM├}īÆš{(di©żo)ųŲĪóPIDūįäė(d©░ng)Ę┤üš{(di©żo)╣Ø(ji©”)Ą╚ČÓĘN¼F(xi©żn)┤·Ė▀ą┬╝╝ąg(sh©┤),“ī(q©▒)äė(d©░ng)¤o(w©▓)╦óļŖÖC(j©®)═Žäė(d©░ng)ūįäė(d©░ng)ķT▀\(y©┤n)ąąĪŻŠ▀ėąūįūR(sh©¬)äeĪóūį╗ųÅ═(f©┤)Īóūį▒Żūo(h©┤)Ą╚ČÓĒŚ(xi©żng)ųŪ─▄╗»╣”─▄ĪŻ▓╗Ą½▀\(y©┤n)ąą╦┘Č╚Ė▀Ż¼╠Ä└Ē╣”─▄ÅŖ(qi©óng)┤¾Ż¼▓óŪęŠ▀ėąžSĖ╗Ą─Ų¼ā╚(n©©i)═Ōć·įO(sh©©)éõŻ¼▒Ńė┌Įė┐┌║═─ŻēK╗»įO(sh©©)ėŗ(j©¼)Ż¼╠žäe▀m║Žė┌ėą┤¾┼·┴┐öĄ(sh©┤)ō■(j©┤)╠Ä└ĒĄ─£y(c©©)┐žŻ¼└¹ė├DSP╝╝ąg(sh©┤)Į©┴óėąą¦Ą─ą┼╠¢(h©żo)╠Ä└Ē─Żą═ęįęųųŲĖ╔ö_įļ┬ĢŻ¼▀_(d©ó)ĄĮą┼įļ▒╚ūŅ┤¾Ż¼ī”(du©¼)▒ŠŽĄĮy(t©»ng)Ą─ų▒┴„¤o(w©▓)╦óļŖÖC(j©®)Ą─£y(c©©)┐ž═Ļ╚½─▄ē“▒ŻūCŲõīŹ(sh©¬)Ģr(sh©¬)ąįĪŻ
ĪĪĪĪ3 ┐žųŲŽĄĮy(t©»ng)ųąĄ─é„ĖąŲ„
ĪĪĪĪī”(du©¼)ė┌ūįäė(d©░ng)ķT┐žųŲŽĄĮy(t©»ng)Ż¼Š═╩Ūé„ĖąŲ„į┌Įė╩šĄĮ═ŌĮńėą╚╦┤µį┌Ģr(sh©¬)Ż¼▀M(j©¼n)ąąķ_ķTäė(d©░ng)ū„Ż¼ų«║¾į┘ĻP(gu©Īn)ķTŻ¼┐žųŲŲ„▓╗Ą½ę¬å╬¬Ü(d©▓)┐žųŲ▄ćķTŻ¼Č°Ūę▀Ćę¬▀M(j©¼n)ąąš¹▄ć═©ą┼╝░Ųõ╦¹┬ō(li©ón)ŽĄŻ¼ę“┤╦─▄ʱėąą¦ķ_ķT╝░╝░Ģr(sh©¬)ĻP(gu©Īn)ķTŻ¼▒Ż│ų▄ćā╚(n©©i)ėąą¦Łh(hu©ón)Š│Č╝╚ĪøQė┌┐žųŲŲ„Ą─įO(sh©©)ėŗ(j©¼)ĪŻ╝t═Ō¤ßßīļŖé„ĖąŲ„╩ŪęįÖz£y(c©©)╚╦¾w╦∙░l(f©Ī)│÷Ą─8Ī½13 ”╠mĄ─╝t═ŌŠĆüĒ┐žųŲĄ─Ż¼ė╔╬ó▓©Ų„╝■░l(f©Ī)│÷Ż¼Įø(j©®ng)╚╦¾wĘ┤╔õŻ¼į┘ė╔Ų„╝■Öz│÷▓óĘ┼┤¾Ż¼ų«║¾┐žųŲ║¾└m(x©┤)ļŖ┬ĘŻ¼╦¹Ą─╠ž³c(di©Żn)╩Ū▓╗╣▄╚╦åT╩ŪʱęŲäė(d©░ng)Ż¼ų╗ę¬╠Äė┌Ėąæ¬(y©®ng)Ų„Ą─Æ▀├ĶĘČć·ā╚(n©©i)Ż¼╦¹Č╝Ģ■(hu©¼)Ę┤æ¬(y©®ng)Ż¼¤o(w©▓)Ę©▀M(j©¼n)ąąĻP(gu©Īn)ķTŻ¼▀@ī”(du©¼)▒ŻūC▄ćŽõā╚(n©©i)Łh(hu©ón)Š│▌^ąĪūā╗»▓╗└¹Ż¼ę“┤╦▓╗▀m║Ž▄ēĄ└▄ć▌v┬ō(li©ón)ĮėĄ─ā╚(n©©i)Č╦ķTŻ¼ę“┤╦į┌▀@└’╬ęéā▀xė├╬ó▓©Ėąæ¬(y©®ng)Ų„Ż¼ėųĘQ╬ó▓©└ū▀_(d©ó)Ż¼╦¹ī”(du©¼)╬’¾wĄ─ęŲäė(d©░ng)▀M(j©¼n)ąąĘ┤æ¬(y©®ng)Ż¼╦¹Ą─Ę┤æ¬(y©®ng)╦┘Č╚▒╚╝t═ŌĖąæ¬(y©®ng)Ų„┐ņŻ¼║▄▀m║Žė┌į┌▄ēĄ└┐═▄ć▄ćķT╩╣ė├Ż¼╦¹Ą─╠ž³c(di©Żn)╩Ūę╗Ą®į┌ķTĖĮĮ³Ą─╚╦åT▓╗Žļ│÷ķTČ°ņoų╣▓╗äė(d©░ng)Ż¼└ū▀_(d©ó)▒Ń▓╗į┘Ę┤æ¬(y©®ng)Ż¼ūįäė(d©░ng)ķTŠ═Ģ■(hu©¼)ĻP(gu©Īn)ķ]Ż¼ė╔ė┌▒ŠįO(sh©©)ėŗ(j©¼)ŽĄĮy(t©»ng)ėąĘ└ŖA╣”─▄Ż¼┐╔ęįĮŌøQėą┐╔─▄│÷¼F(xi©żn)Ą─ŖA╚╦¼F(xi©żn)Ž¾ĪŻ
ĪĪĪĪ4 ┐žųŲŽĄĮy(t©»ng)Ą─┐žųŲĘĮĘ©┼c│╠ą“įO(sh©©)ėŗ(j©¼)
ĪĪĪĪ4.1 ▓╔ė├Ą─┐žųŲĘĮĘ©
ĪĪĪĪ┐žųŲĘĮĘ©▓╔ė├ų▒ĮėöĄ(sh©┤)ūų┐žųŲĘĮĘ©Ż¼╩Ūę╗ĘN▌^║├Ą─į┌ŠĆīŹ(sh©¬)Ģr(sh©¬)┐žųŲŻ¼ę╗░Ńī”(du©¼)▌ö│÷┐žųŲ┴┐y(t)║═▌ö╚ļ╬╗ų├┴┐x(t)Ą─PID┐žųŲ╦ŃĘ©×ķŻ║
ĪĪŲõųąKp×ķ▒╚└²Š│굯¼Ti×ķĘeĘųĢr(sh©¬)ķg│ŻöĄ(sh©┤)Ż¼Td×ķ╬óĘųĢr(sh©¬)ķg│ŻöĄ(sh©┤)ĪŻ×ķ£p╔┘ėŗ(j©¼)╦Ń┴┐Ż¼Ė─×ķė├║═╩Į╝░▓ŅĘųėŗ(j©¼)╦ŃŻ¼ę“┤╦«ö(d©Īng)▓╔śėų▄Ų┌×ķTĢr(sh©¬)ėąŻ║
ĪĪĪĪį┌ūįäė(d©░ng)ŠĒ║¤ķTķ_ĻP(gu©Īn)ķ]▀^│╠ųąįO(sh©©)ę╗ķ_ĻP(gu©Īn)┴┐ą┼╠¢(h©żo)ū÷ę╗╬╗ų├ą┼╠¢(h©żo)”┼Ż¼«ö(d©Īng)ėŗ(j©¼)╦ŃĄ─▌ö╚ļ┴┐╬╗ų├┴┐x(t)į┌┤╦╬╗ų├ą┼╠¢(h©żo)═ŌĢr(sh©¬)Ż¼╝┤x(t)>”┼Ģr(sh©¬)Ż¼▌ö│÷┐žųŲ┴┐y(t)ėą▌^┐ņĒææ¬(y©®ng)╦┘Č╚Ż¼ūįäė(d©░ng)ķTķ_ķ]Ę┤æ¬(y©®ng)┐ņ╦┘Ż╗Ę┤ų«ät▌^┬²Ą½ėąę╗Č©Š½Č╚▓óīŹ(sh©¬)¼F(xi©żn)ę╗ą®╦∙ŅA(y©┤)įO(sh©©)╣”─▄╚ńĘ└ŖAīŹ(sh©¬)¼F(xi©żn)Ą╚ĪŻŲõėŗ(j©¼)╦Ń╣½╩Į×ķŻ║
ĪĪĪĪ╩Įųą«ö(d©Īng)x(t)>”┼Ģr(sh©¬)Ż¼K1=1Ż╗«ö(d©Īng)x(t)Ī▄”┼Ģr(sh©¬)Ż¼K1=0ĪŻ▀@śė«ö(d©Īng)ūįäė(d©░ng)ķTķ_åó╝░ĻP(gu©Īn)ķ]│§╩╝Ģr(sh©¬)┐╔╚ĪŽ¹ĘeĘųū„ė├Ż¼ĘeĘųĄ─└█Ęeą¦æ¬(y©®ng)┐žųŲį┌║▄ąĪĘČć·Ż¼Č°Ūę▒▄├Ō┴╦ŽĄĮy(t©»ng)š±╩Ä▓ó╩╣Š½Č╚╚įĄ├ęį▒ŻūCĪŻ
ĪĪĪĪī”(du©¼)ė┌ę╗éĆ(g©©)═Ļ├└Ą─£y(c©©)┐žŽĄĮy(t©»ng)üĒšfŻ¼▒žĒÜ─▄ē“Š½┤_ĄžÅ═(f©┤)ųŲ▒╗£y(c©©)ą┼╠¢(h©żo)Ą─▓©ą╬Ż¼Ęų╬÷ėŗ(j©¼)╦Ń║¾Ż¼Įo│÷£╩(zh©│n)┤_Ą─▌ö│÷┐žųŲą┼╠¢(h©żo)Ż¼Ūęį┌Ģr(sh©¬)ķg╔Žø]ėą╚╬║╬Ą─čėĢr(sh©¬)ĪŻį┌īŹ(sh©¬)ļHĄ─ŽĄĮy(t©»ng)ųąŻ¼tĢr(sh©¬)┐╠Ą─▌ö╚ļx(t)┼c▌ö│÷y(t)ų«ķgĄ─ĻP(gu©Īn)ŽĄ×ķŻ║y(t)=Kx(t-t0)Ż¼╩ĮųąKŻ¼t0Č╝╩Ū│Ż┴┐Ż¼į┌▒Šķ]Łh(hu©ón)£y(c©©)┐žŽĄĮy(t©»ng)ųąŻ¼ŽĄĮy(t©»ng)Ą─▌ö│÷ī”(du©¼)▌ö╚ļĄ─£■║¾Ģ■(hu©¼)ŲŲē─ŲõĘĆ(w©¦n)Č©ąįŻ¼ę“┤╦ūŅ┤¾Ž▐Č╚▒ŻūCŽĄĮy(t©»ng)Š½┤_╗“▓╗╩¦šµĄ─Śl╝■Š═╩Ūt0=0Ż¼Ą½īŹ(sh©¬)ļHĘ┤ü┐žųŲųąt0▓╗┐╔─▄×ķ0Ż¼ę▓Š═▓╗┐╔▒▄├ŌĄž│÷¼F(xi©żn)£y(c©©)┴┐╝░┐žųŲĄ─╦└ģ^(q©▒)Ģr(sh©¬)ķgĪŻ╦∙ų^╦└ģ^(q©▒)Ģr(sh©¬)ķg┐╔ęįČ©┴x×ķÅ─Ī░£y(c©©)┴┐é„ĖąŲ„Öz£y(c©©)ĄĮūā┴┐ķ_╩╝Ė─ūāĄ─╦▓Ģr(sh©¬)Ī▒ĄĮĪ░┐žųŲŲ„ī”(du©¼)╔·«a(ch©Żn)▀^│╠ķ_╩╝╩®╝ėš²┤_ėąą¦Ė╔ŅA(y©┤)Ą─╦▓Ģr(sh©¬)Ī▒ų«ķgĄ─čė▀tĢr(sh©¬)ķgĪŻį┌įć“×(y©żn)▀^│╠ųąŻ¼īóé„ĖąŲ„░▓čbų┴ūįäė(d©░ng)ķTųą▓┐╬╗ų├Ż¼š{(di©żo)š¹▀_(d©ó)ĄĮ┴╦╠Į£y(c©©)ą┼╠¢(h©żo)Ą─ūŅČ╠ŠÓļxŻ¼£p╔┘┴╦é„▌öčėĢr(sh©¬)Ż¼į┌░▓čb╔ŽŽ¹│²ę╗▓┐Ęų╦└ģ^(q©▒)Ģr(sh©¬)ķgŻ╗┴Ē═Ōš{(di©żo)š¹┐žųŲŲ„Ą─Ų½▓Ņ╚▌Õe(cu©░)Č╚Ż¼╝┤£p╚§┐žųŲŲ„Ą─š¹Č©ģóöĄ(sh©┤)Ż¼ęį┤╦üĒ£pŠÅŽĄĮy(t©»ng)Ą─Ēææ¬(y©®ng)╦┘Č╚Ż¼į┌▓╗┐╔─▄Ž¹│²Ą─ŪķørŽ┬Ż¼£p╔┘╦└ģ^(q©▒)Ģr(sh©¬)ķgĪŻŽ¹│²š`▓ŅĄ─╣żū„ųąŻ¼į┌▒ŻūC┐╔┐┐▀mė├Ż¼▒▄├ŌĦüĒ│╔▒Š╠ßĖ▀Ż¼į┌│õĘųįć“×(y©żn)║¾▀xō±Ū░├µ╠ߥĮą═╠¢(h©żo)▒ŻūC┴╦╔ŽŽ┬į¬Ų„╝■Ą─┐╔┐┐╩╣ė├ĪŻ▓╔ė├ļŖ┤┼╝µ╚▌ąį(EMC)įO(sh©©)ėŗ(j©¼)ļŖŲ„ŽĄĮy(t©»ng)Ż¼┐╦Ę■ą┼╠¢(h©żo)Ė╔ö_å¢Ņ}ĪŻ
|
|
|
|
|
|
|
|
|
|